首页
关于
Search
1
短信验证码(接码)平台
6,945 阅读
2
【教程】非常详细的Wireshark抓取抖音直播的OBS推流地址和密钥
5,392 阅读
3
【工具】自动获取抖音直播的OBS推流地址和密钥
5,056 阅读
4
【教程】教你使用VISA信用卡时的信息怎么填
4,803 阅读
5
【教程】搭建咸鱼之王私服,附源码下载
4,758 阅读
学习笔记
安装笔记
好用软件
随便写写
正经科研
TODO清单
登录
/
注册
推荐文章
推荐
【教程】比亚迪车机接入AI大模型语音助手
推广宣传
超便宜的轻量应用服务器
最新发布
2022-03-19
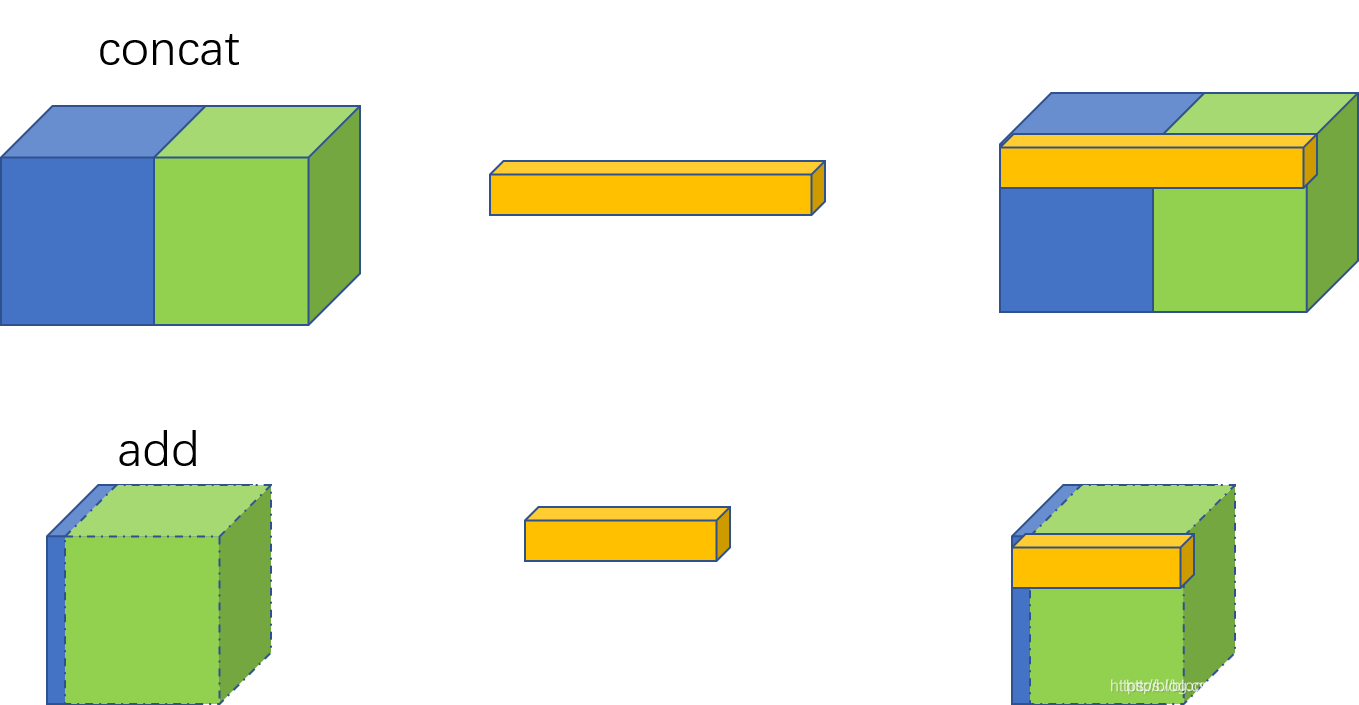
CNN中concat与add的区别
整理自网上
深度学习
哗啦啦
4年前
0
459
0
2022-03-19
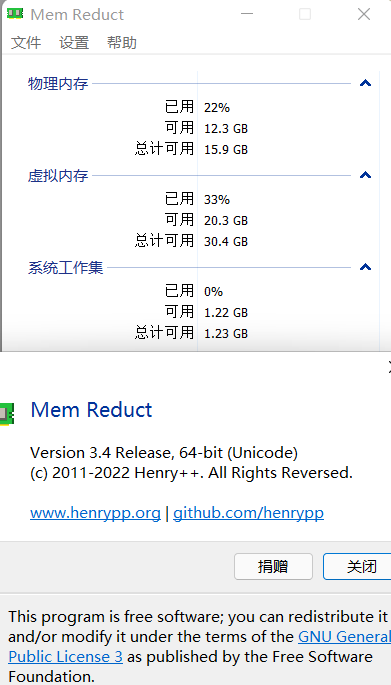
桌面窗口管理器Dwm.exe消耗较高的CPU或内存
清理内存利器!
Windows软件
# 内存
# Windows
哗啦啦
4年前
0
818
0
2022-03-17
国际顶级会议列表
供参考
调研与报告
哗啦啦
4年前
0
346
0
2022-03-16
特征融合相关论文片段记录
希望能有点灵感帮助
调研与报告
# 特征工程
哗啦啦
4年前
0
281
0
2022-03-16
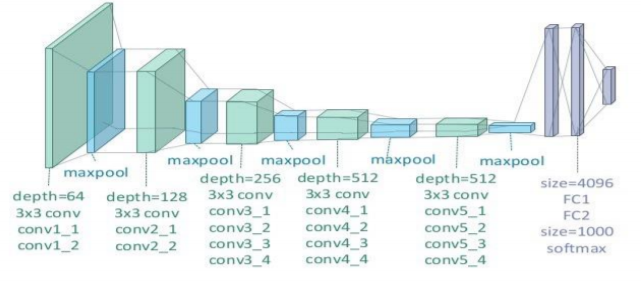
SIFT的PyTorch实现
若需自取~
深度学习
# SIFT
哗啦啦
4年前
0
403
0
上一页
1
...
34
35
36
...
40
下一页
 推荐
推荐

 推荐
推荐