首页
关于
Search
1
短信验证码(接码)平台
7,940 阅读
2
【教程】非常详细的Wireshark抓取抖音直播的OBS推流地址和密钥
5,745 阅读
3
【教程】教你使用VISA信用卡时的信息怎么填
5,601 阅读
4
【教程】搭建咸鱼之王私服,附源码下载
5,385 阅读
5
【工具】国内免加速免注册免费使用ChatGPT AI对话机器人
5,363 阅读
学习笔记
安装笔记
好用软件
随便写写
正经科研
TODO清单
登录
/
注册
找到
21
篇与
相关的结果
- 第 2 页
2023-08-11
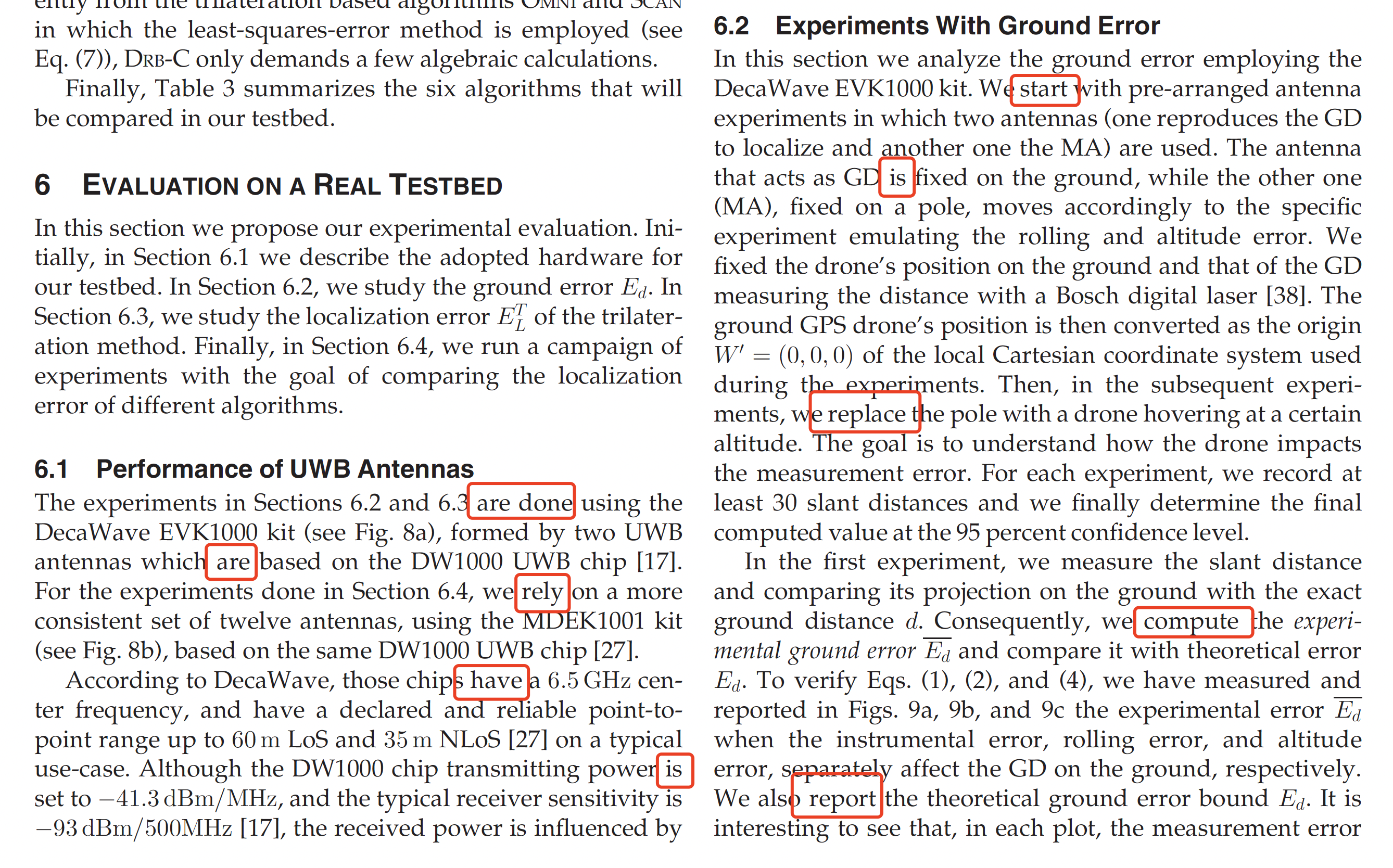
【踩坑】学术论文中的时态问题,以实际论文为例
好坑啊
知识点与小技巧
# 科研
哗啦啦
3年前
0
448
0
2023-07-01
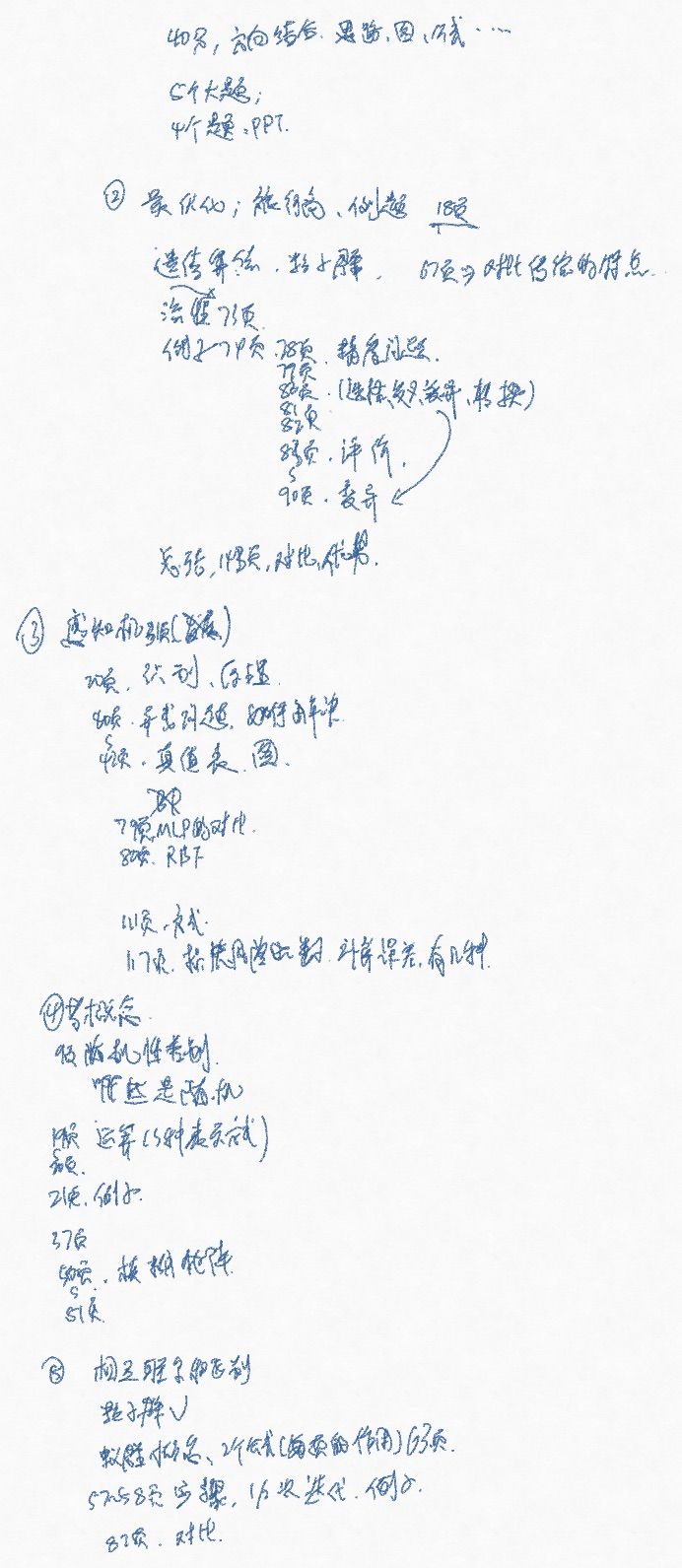
【笔记】华南理工大学-智能计算方法 考试重点笔记
详细的笔记
知识点与小技巧
# 科研
哗啦啦
3年前
0
274
0
2023-04-28
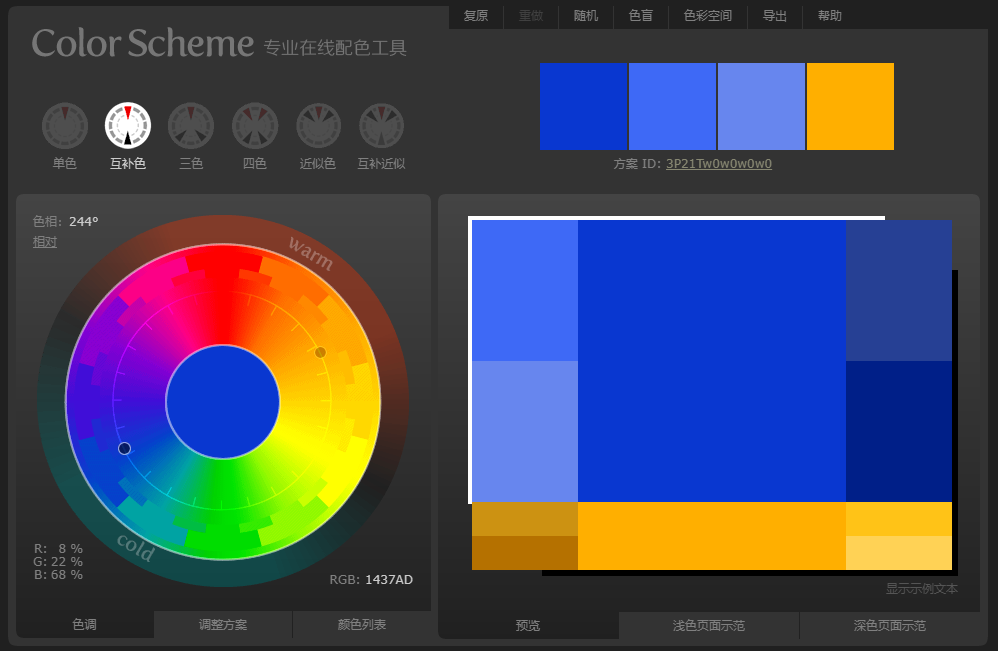
【福利】7个配色网站,论文作图和PPT必备
收藏备用!
知识点与小技巧
# 配色
哗啦啦
3年前
0
571
0
2023-03-24
【技巧】使用ChatGPT来改进论文的一些Prompt
非常实用
知识点与小技巧
# ChatGPT
哗啦啦
3年前
0
429
0
2023-03-05
【知识点】有关分布式GNN训练的一些问答
分布式GNN
知识点与小技巧
# 科研
# GNN
# 分布式
哗啦啦
3年前
0
430
1
上一页
1
2
3
...
5
下一页