首页
关于
Search
1
短信验证码(接码)平台
6,779 阅读
2
【教程】非常详细的Wireshark抓取抖音直播的OBS推流地址和密钥
5,320 阅读
3
【工具】自动获取抖音直播的OBS推流地址和密钥
5,001 阅读
4
【教程】搭建咸鱼之王私服,附源码下载
4,661 阅读
5
【教程】教你使用VISA信用卡时的信息怎么填
4,635 阅读
学习笔记
安装笔记
好用软件
随便写写
正经科研
TODO清单
登录
/
注册
找到
1
篇与
相关的结果
2022-12-17
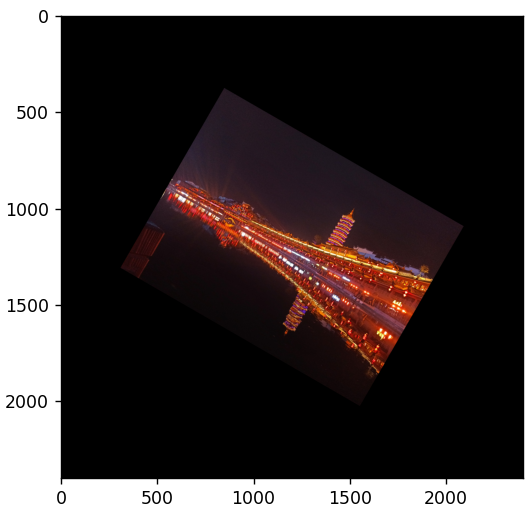
【工具】根据旋转角度/缩放值进行透视/逆透视IPM变换的OpenCV Python代码
参数直观,拿来即用
代码与算法
# python
# OpenCV
# 透视变换
哗啦啦
4年前
1
525
0